チョコ停の原因と切り分け方|頻発する設備停止をゼロにする根本対策とは?
ロボティクスソリューション
製造現場で頻発する「チョコ停」。短時間で復旧できるため軽視されがちですが、積み重なれば、年間で莫大な機会損失を生み出し、設備総合効率(OEE)を大きく低下させます。
本記事では、生産効率やOEE改善に悩む設備保全・生産技術担当者に向けて、複雑に絡み合うチョコ停の原因を正確に切り分ける手法と、自動化ラインで多発する「ロボットのチャックミス」を根本から解決する最新のアプローチを解説します。
チョコ停(小故障)とは?その定義とリスク
製造現場で「チョコ停」と呼ばれる現象は、日本産業規格(JIS Z 8141)において「小故障」と定義されています。具体的には、部品交換や大がかりな修理を必要とせず、ワークの除去やリセットといった簡単な処置で復旧できる、短時間の設備停止を指します。
「チョコ停」と「ドカ停」の違い
現場の改善活動においては、まず「ドカ停」との構造的な差異を理解する必要があります。
| 比較項目 | チョコ停(小故障) | ドカ停(大故障) |
| 停止時間 |
数秒〜10分以内 |
1時間以上(数日に及ぶこともある) |
| 復旧作業者 |
現場のオペレーター |
メンテナンス部門、メーカー技術者 |
| 主な処置 | ワーク除去、リセット、簡易清掃 | 部品交換、分解修理、プログラム改修 |
| 発生頻度 | 極めて高い(日常化しやすい) | 低い(突発的に発生) |
放置が招く「ドカ停」への連鎖
チョコ停は、設備の異常や劣化の「兆候」です。例えば、センサーエラーの頻発は単なる汚れではなく、取り付け部の微振動による金属疲労の予兆かもしれません。
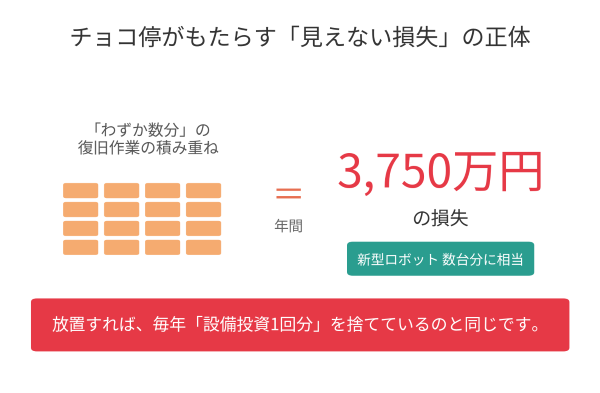
チョコ停がもたらす「見えない損失」の正体
「すぐに復旧できるから」とチョコ停を放置することは、将来的な「ドカ停(大故障)」という重大な損失を先送りすることに繋がります。微小な異常が積み重なることで、やがて部品の完全破損などの致命的な設備故障を誘発するリスクがあるため、早期の根本対策が不可欠です。
莫大な機会損失の試算
単なる停止時間だけでなく、以下の要素を掛け合わせた「機会損失」として捉えることが改善の第一歩です。
【機会損失の算出式】
停止時間(分)×生産能力(個/分)×発生回数×製品単価
以下が具体例です。
3分×100個/分×10回×50円=150,000円/日
- 条件例:単価50円、分間100個生産、1回3分のチョコ停が1日10回発生
- 損失額:1日あたり15万円、年間(250日)で3,750万円の損失
※本試算は、中~大規模な自動化ラインにおけるシミュレーション値です。
稼働条件や製品単価により変動しますが、チョコ停が経営に与える「規模感」の目安としてご参照ください。
この金額は、最新のIoT設備導入や保全人員の増強コストを正当化するのに十分な規模です。また、停止と再開を繰り返すことで製品寸法が不安定になり、歩留まりの低下(立ち上がりロス)を招くリスクもあります。
※これは最大生産能力ベースの理論的機会損失額です。

チョコ停の根本原因を「4M」で切り分ける
チョコ停の原因は多岐にわたり、一見しただけでは特定が困難です。原因を客観的かつ体系的に切り分けるためには、IoTなどを用いたデータ収集(ワークサンプリング)を行い、「4M(Man, Machine, Material, Method)」の観点から分析することが有効です。
- 設備的要因(Machine):設備の摩耗や油切れ、センサーの汚れによる誤検知などが該当します。特に、ロボットや自動機のハンドリング(把持)ミスは頻出するトラブルです。
- 材料的要因(Material):投入されるワークの厚みや硬さ、形状のばらつき、バリの発生などが挙げられます。ロットごとにワークの寸法が異なると、搬送路での引っ掛かりやチャックミスの原因となります。
- 方法的要因(Method):工程間の生産速度が合っていない不適切なラインバランスや、センサーの感度設定が過敏すぎることなどが停止を誘発します。
- 人的要因(Man):作業者ごとのスキル差や、作業手順からの逸脱が突発的なエラーを引き起こします。

収集したデータをパレート図などで可視化し、発生頻度が高い上位の要因から重点的に対策を打つことが重要です。
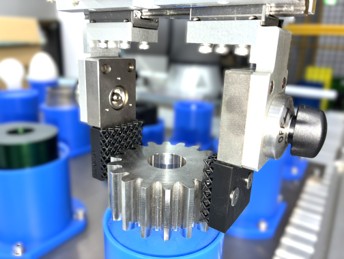
自動化ラインで多発する「チャックミス」の罠
4M分析を進めていくと、特に自動化・ロボット化が進んだ現場において、「設備(Machine)」と「材料(Material)」が交差する領域に原因が集中していることが見えてきます。中でも、ロボットハンドの開閉ツメによる「チャックミス」起因のチョコ停は、改善インパクトの大きい重要課題です。
多品種少量生産の現場では、不定形ワークや異形ワークが混流することが多く、従来の「剛性の高い(硬い)」ロボットハンドでは、個々のワークの微細な形状差を吸収できません。その結果、以下のような問題が発生します。
- 対象物の形状に合わせた専用のハンド(チャック)が必要になり、ツールチェンジ(段取り替え)作業が頻発する。
- カムなどの不定形対象物のチャックが不安定になり、ワークを落としてしまう。
- 無理に強い力で把持しようとして、ワークに傷をつけてしまう。
このような物理的なチャックミスは、清掃やパラメーター調整といったソフト面の対策だけでは限界があります。チョコ停を根本から解決するためには、エンドエフェクタ(ハンドツール)そのものを、ワークのばらつきを許容できる物理構造へと見直す必要があります。
チャックミスを撲滅する解決策:ロボットハンド「柔軟指」
チャックミス起因のチョコ停を解決し、OEE向上を実現する有効なハード的対策として注目されているのが、リックス株式会社が提供するロボットハンドエンドエフェクタ「柔軟指」です。
複雑な形状も優しく包み込む「ラティス構造」
柔軟指は、特殊ポリウレタン樹脂を用いた3Dプリンター製で、「ラティス構造」と呼ばれる立体的な格子構造を持っています。この独自の構造により、対象物に触れるとワークの形に合わせて柔軟に変形し、面接触して優しく包み込むように把持します。
ツールチェンジ不要で多品種混流に対応
対象物の形状に倣って形を変えるため、異形ワークやサイズ違いのワークであっても、一つのツメですべて安定して掴むことが可能です。これにより、ハンドリングミスを防ぐだけでなく、品種ごとの煩雑なハンドの段替え(ツールチェンジ)工数を大幅に削減できます。
ゲルやスポンジとは違う「高耐久」
一般的に柔らかいロボットハンドの素材として使われるゲルやスポンジとは異なり、柔軟指は強度のある特殊ポリウレタンを使用し、構造設計によって「やわらかさ」を実現しています。そのため非常に耐久性が高く、450万回程度の繰り返しチャック動作においても問題ないという実績を誇ります。
【導入事例】1日10回のチョコ停が「ゼロ」に
実際に、柔軟指は自社工場でも大きな成果を上げています。リックスの福岡事業所におけるロータリージョイント(回転継手)の研削工程において、自動機に1つのハンドで様々なワークをハンドリングさせようとしたところ、当初はチャックミスによるチョコ停が「1日に数回〜多い時で10回程度」発生していました。
そこで、ロボットハンドのツメを「柔軟指」に変更したところ、ワークのばらつきを吸収して安定した把持が可能になり、チャックミスによるチョコ停が発生していません。現場でも高く評価され、安定した稼働を続けています。

▼実際の動作や現場の声はこちらの動画をご覧ください
まとめ
チョコ停は、現場の生産効率や利益を内部から蝕む見逃せない課題です。データと「4M」を用いた原因の切り分けと並行して、チャックミスに強いハードウェアを導入することが、チョコ停ゼロへの近道となります。「多品種のワークが混流していてハンドリングが安定しない」「チャックミス起因のチョコ停に悩まされている」という設備保全・生産技術担当者の方は、ぜひ一つのハンドで多様なワークに対応できる「柔軟指」の導入をご検討ください。

ロボティクスソリューション
